
Sa-BOT-age
Tools Used: Python, Solidworks, 3D-Printing
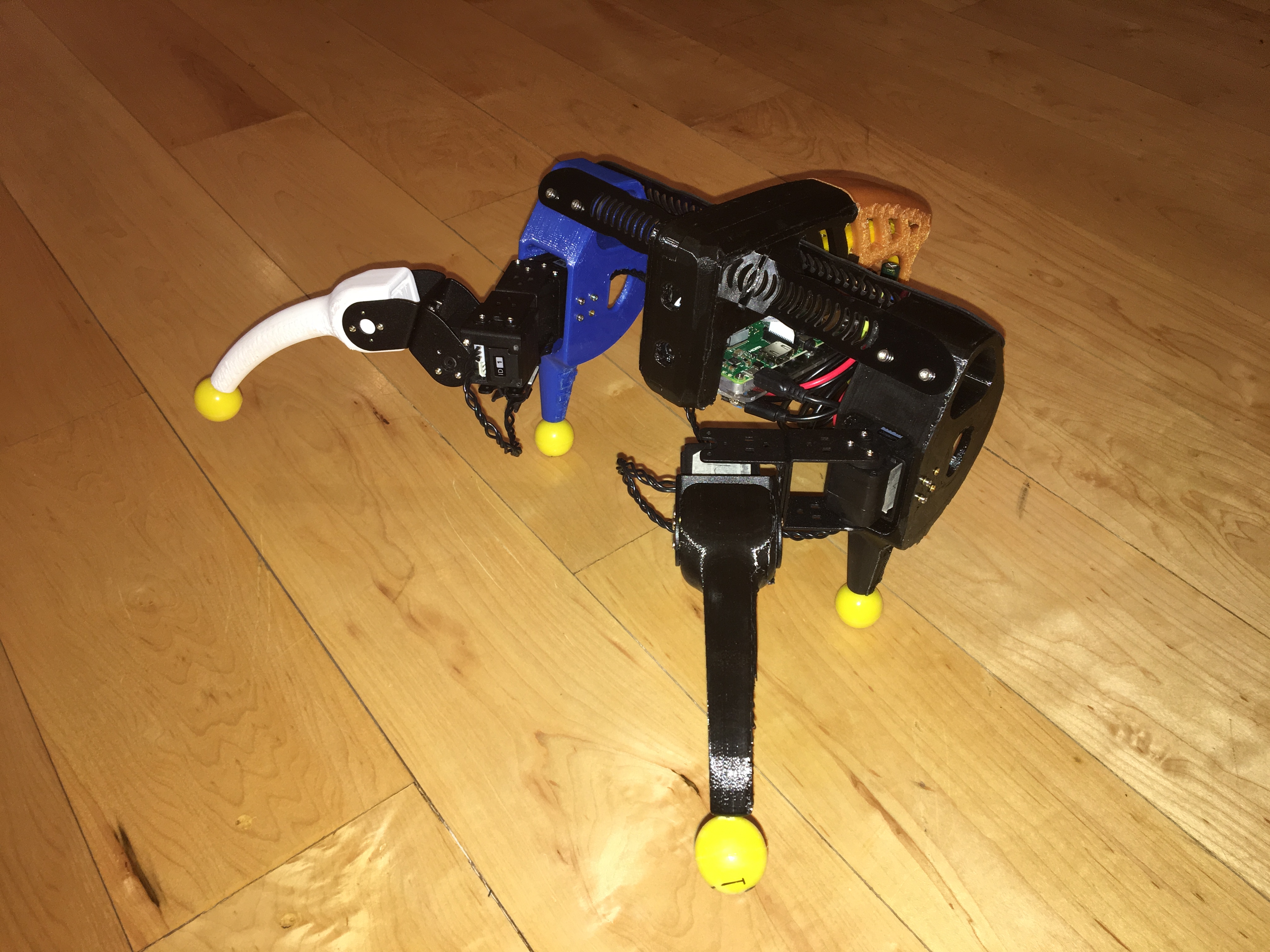
I designed, 3D printed, assembled, and programmed a robot that is able to walk. Tools Used: Python, Solidworks, 3D-Printing
I first virtually prototyped my design of a walking robot, which is inspired by how crabs walk. I then 3D-printed and assembled the components. I also attached/wired four LewanSoul servo motors and a camera, with which I interface via a Python program running on a Raspberry Pi. It has three static legs that give it a stable resting position, and two dynamic arms to pull it forward.
I worked on this robot as part of my Robotics Studio Course.