Lahav LipsonI've worked on 3D reconstruction, including dense geometry, camera motion, and object motion. These projects often combined both deep learning and multiview geometry. I've also worked on procedural generation of 3D training data to address the data bottleneck in 3D vision. I did my PhD in the Vision & Learning Lab at Princeton University, supervised by Prof. Jia Deng. I'm currently a researcher at Apple. |

|
Research |
|
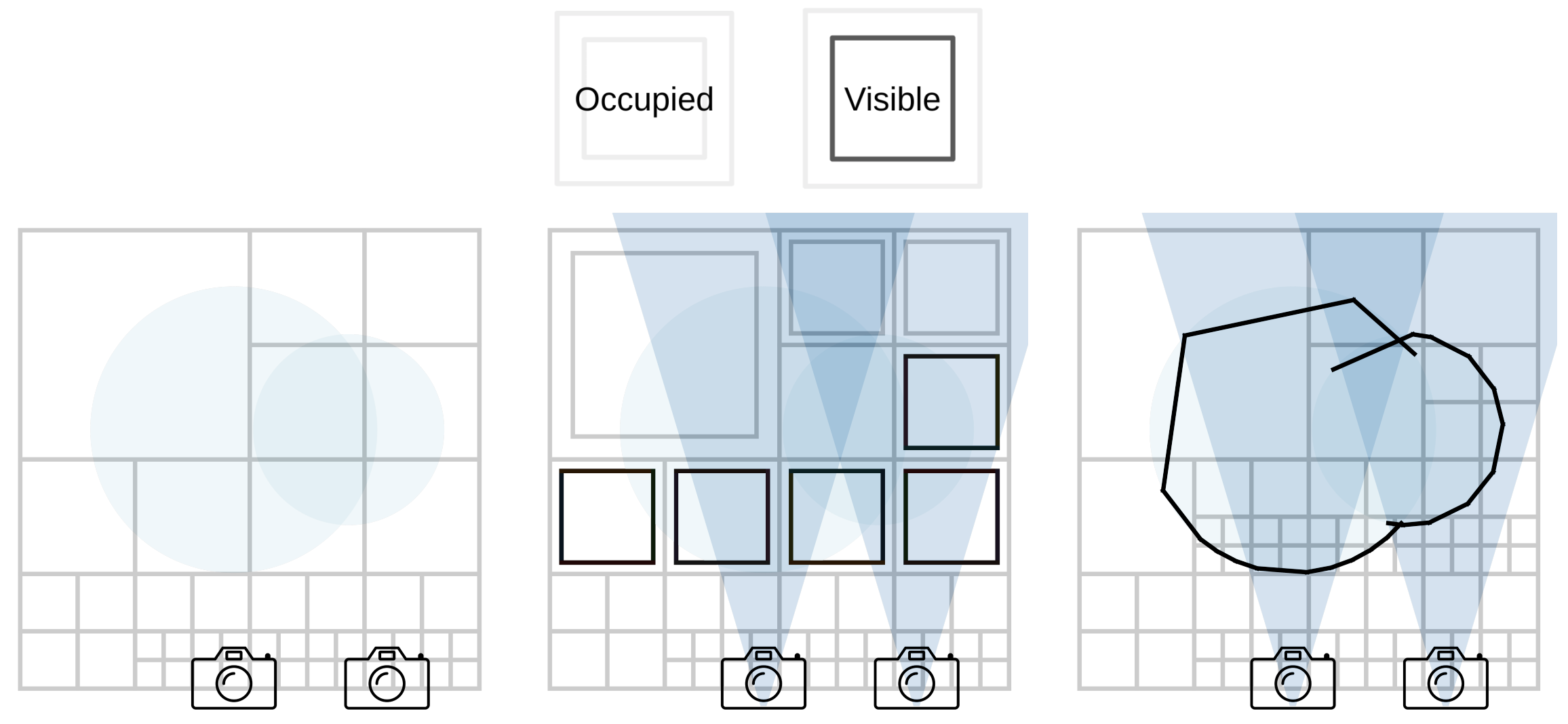
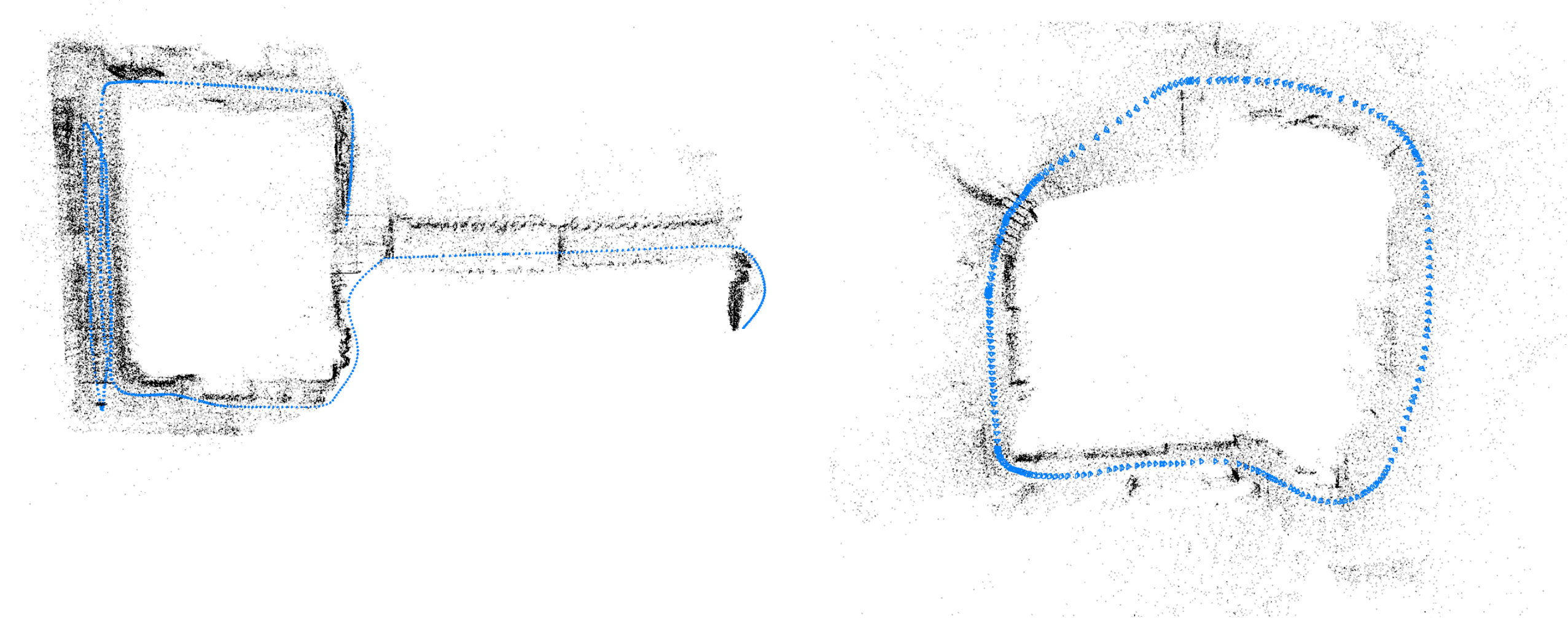
Multi-Session SLAM with Differentiable Wide-Baseline Pose OptimizationLahav Lipson and Jia Deng CVPR 2024 paper / code |

|
Infinigen Indoors: Photorealistic Indoor Scenes using Procedural GenerationAlexander Raistrick*, Lingjie Mei*, Karhan Kaan Kayan* (equal contribution) David Yan, Yiming Zuo, Beining Han, Hongyu Wen, Meenal Parakh, Stamatis Alexandropoulos, Lahav Lipson, Zeyu Ma, Jia Deng CVPR 2024 paper (coming soon) / code (coming soon) |
|
View-Dependent Octree-based Mesh Extraction in Unbounded Scenes for Procedural Synthetic DataZeyu Ma, Alexander Raistrick, Lahav Lipson, Jia Deng Arxiv 2023 paper / code (integrated into Infinigen) |

|
Infinigen: Infinite Photorealistic Worlds using Procedural GenerationLahav Lipson*, Alexander Raistrick*, Zeyu Ma* (* equal contribution), Lingjie Mei, Mingzhe Wang, Yiming Zuo, Karhan Kayan, Hongyu Wen, Beining Han, Yihan Wang, Alejandro Newell, Hei Law, Ankit Goyal, Kaiyu Yang, Jia Deng CVPR 2023 website / paper / video / code |
|
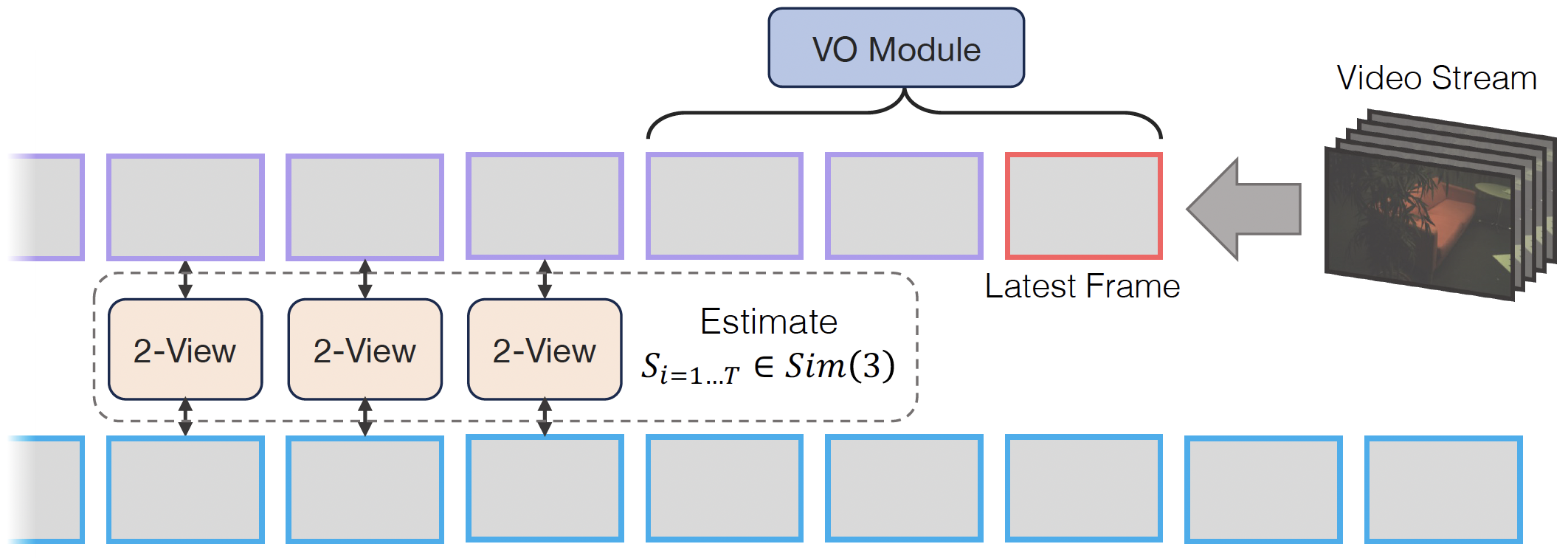
Deep Patch Visual OdometryZachary Teed*, Lahav Lipson* and Jia Deng (* equal contribution) Neurips 2023 paper / code |
Coupled Iterative Refinement for 6D Multi-Object Pose EstimationLahav Lipson, Zachary Teed, Ankit Goyal and Jia Deng Co-Winner of the BOP Object Pose Challenge at ECCV 2022 and ICCV 2023 CVPR 2022 paper / code / poster / video |
|
RAFT-Stereo: Multilevel Recurrent Field Transforms for Stereo MatchingLahav Lipson, Zachary Teed and Jia Deng 3DV 2021 (Best Student Paper) paper / code / poster |
|